Dziele siê moim ostatnim "wynalazkiem"
ACU - Audio Control Unit
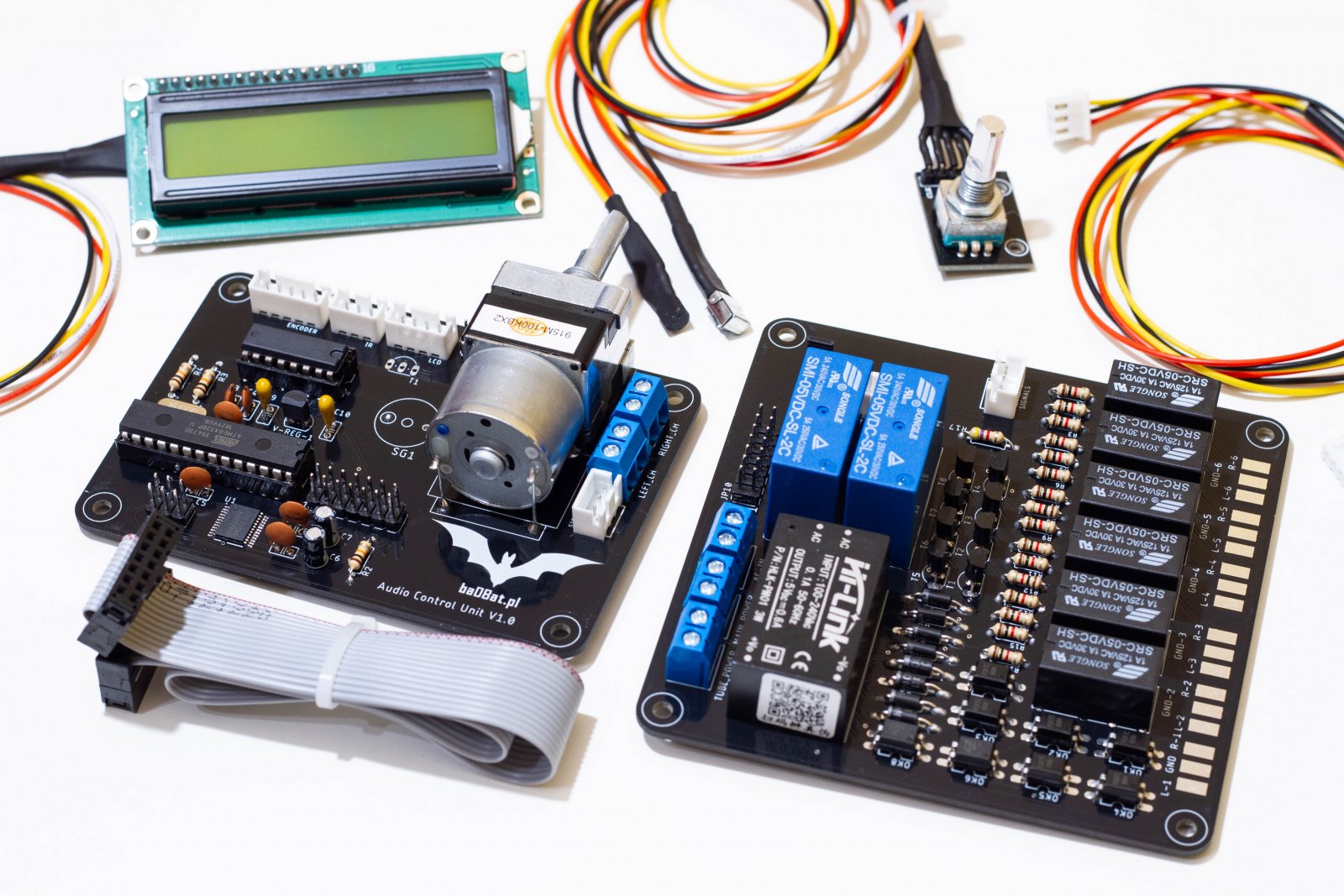
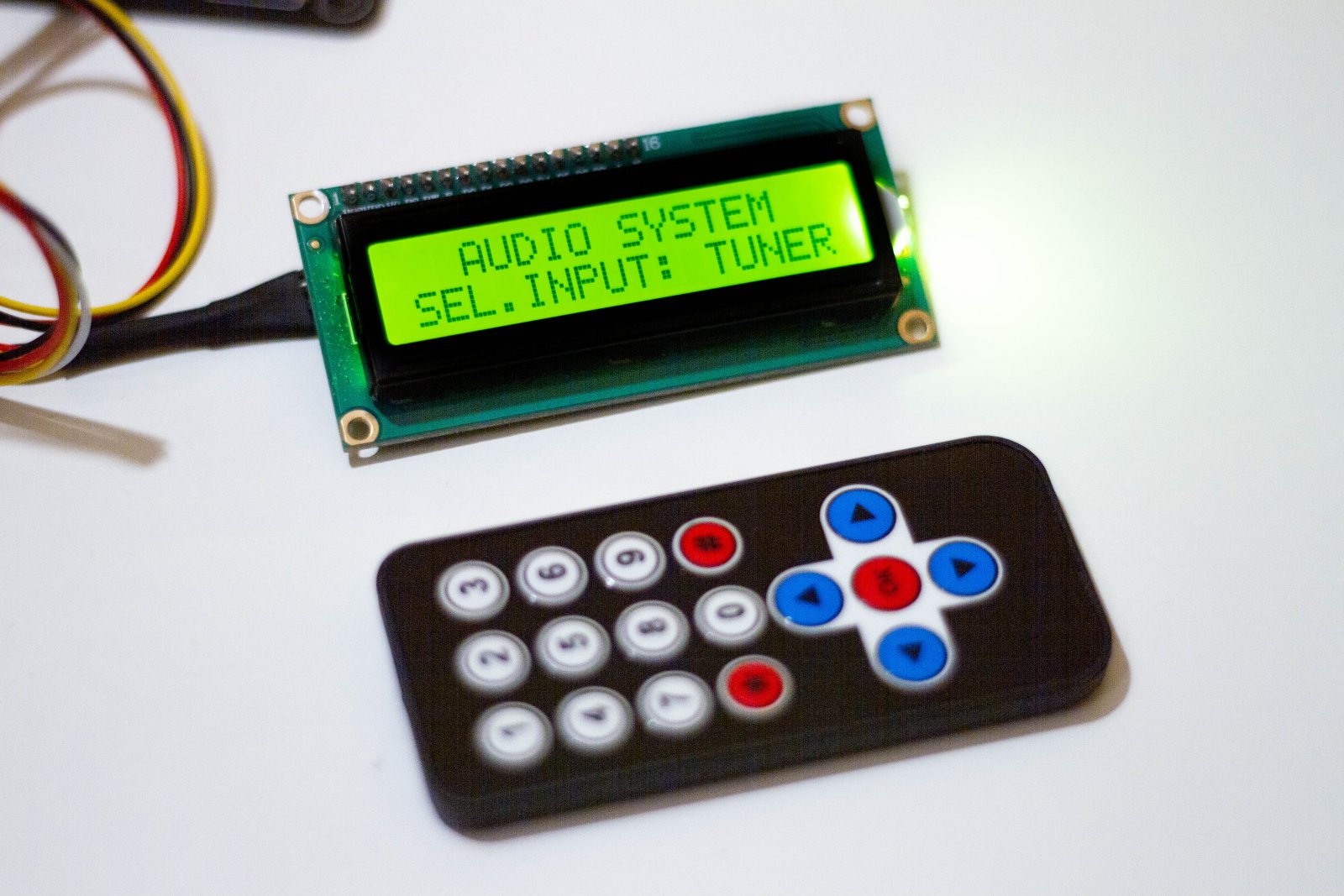
Mikroprocesorowy selektor stworzony z my¶l± o wymagaj±cych konstrukcjach, wyposa¿ony jest we w³asne zasilanie, wy¶wietlacz LCD, enkoder, czujnik temperatury oraz pilot.
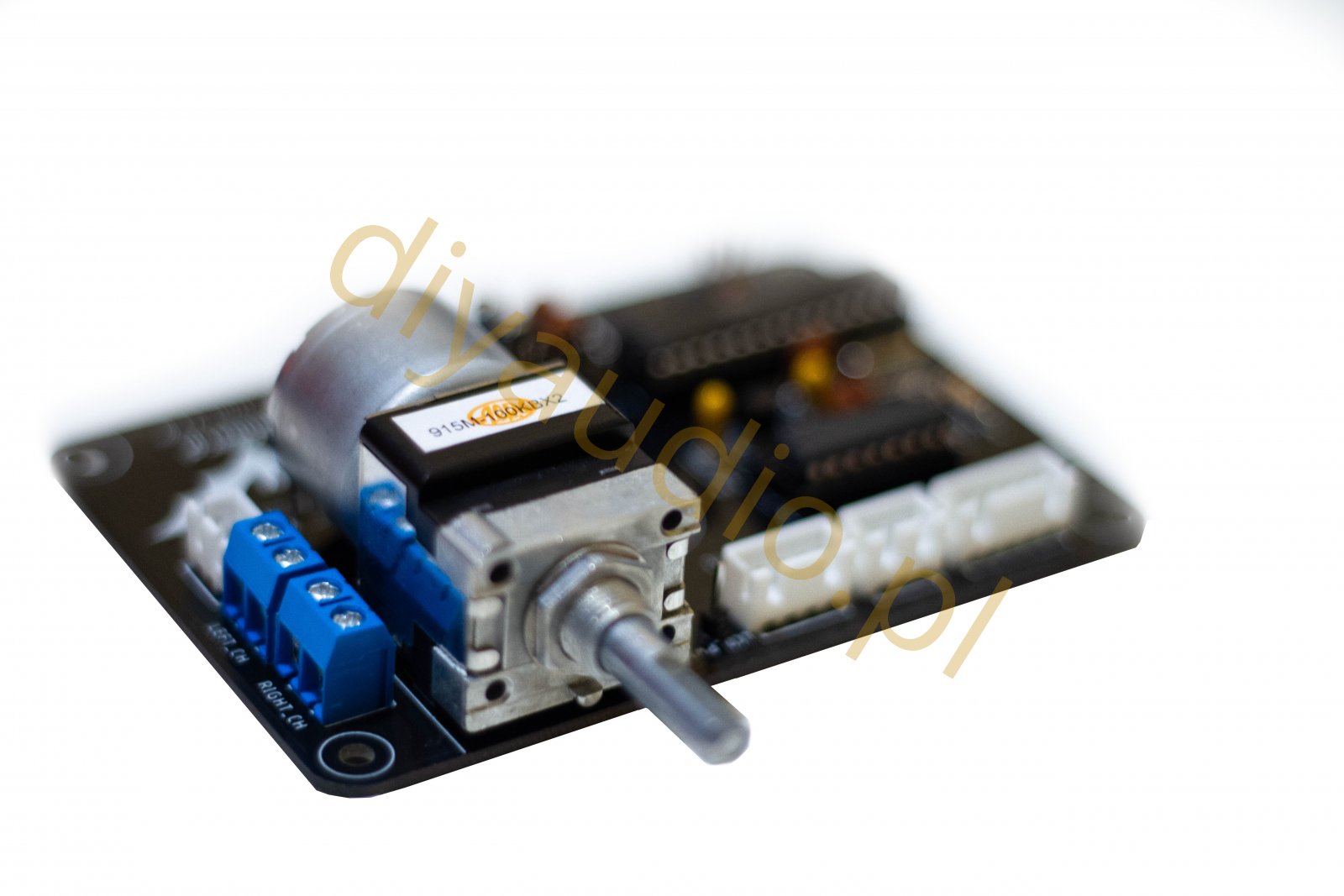
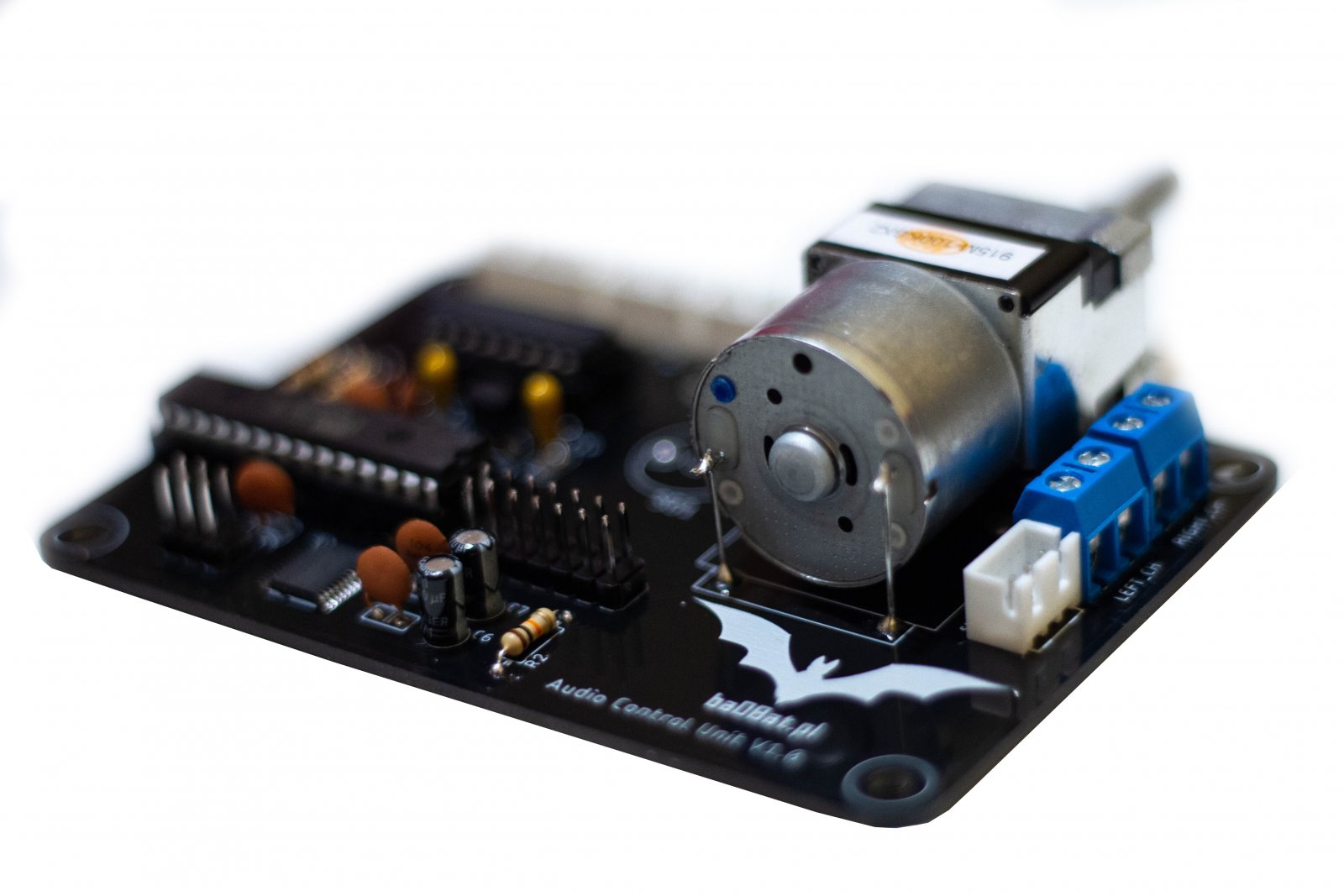
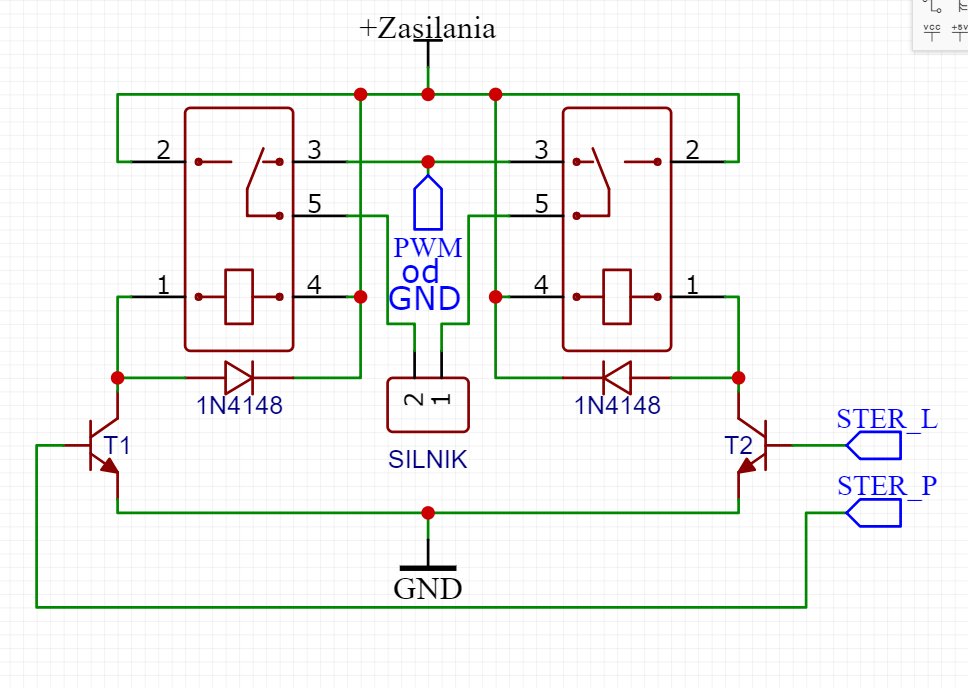
Selektor posiada potencjometr marki ALPS wyposa¿ony w silnik dziêki temu g³o¶no¶ci± mo¿emy sterowaæ poprzez pilot zdalnego sterowania.
ACU posiada czujnik temperatury, przy pomocy ukrytego menu sam mo¿esz ustaliæ temperaturê która mo¿e uszkodziæ Twój wzmacniacz, po osi±gniêciu krytycznej warto¶ci selektor wy³±czy zasilanie wzmacniacza.
6 kana³ów - urz±dzenia posiada 6 wej¶æ: DAC, CD, PHONO, TUNER, AUX, TAPE
Tryb STANDBY - dziêki pe³nej integracji z ka¿dym wzmacniaczem, selektor umo¿liwia sterowanie transformatorem wzmacniacza i pe³ne wsparcie dla tryby STANDBY przez pilot zdalnego sterowania lub enkoder (pobór pr±du w tym trybie to zaledwie 20mA)
Opó¼nienie startu dla PHONO - wybieraj±c odpowiednie po³o¿enie jednej zworki na laminacie mo¿esz uaktywniæ opó¼nienie startu dla wej¶cia PHONO (je¶li posiadasz lampowe PHONO pozwoli to unikn±æ nieprzyjemnych d¼wiêków w czasie nagrzewania lampy) czas opó¼nienia mo¿esz ustawiæ sam w ukrytym menu.
Pamiêæ wszystkich ustawieñ - dziêki zastosowaniu mikroprocesora selektor pamiêta ostatni wybór oraz wszystkie ustawienia nawet po ca³kowitym od³±czeniu go od pr±du.
Wygaszacz LCD - dla wiêkszego komfortu u¿ytkowania, wy¶wietlacz LCD wygasza swoje pod¶wietlenie w czasie bezczynno¶ci po up³ywie 60 sekund. Pod¶wietlenie wraca automatycznie przy uruchomieniu jakiejkolwiek funkcji lub poruszeniu selektora.
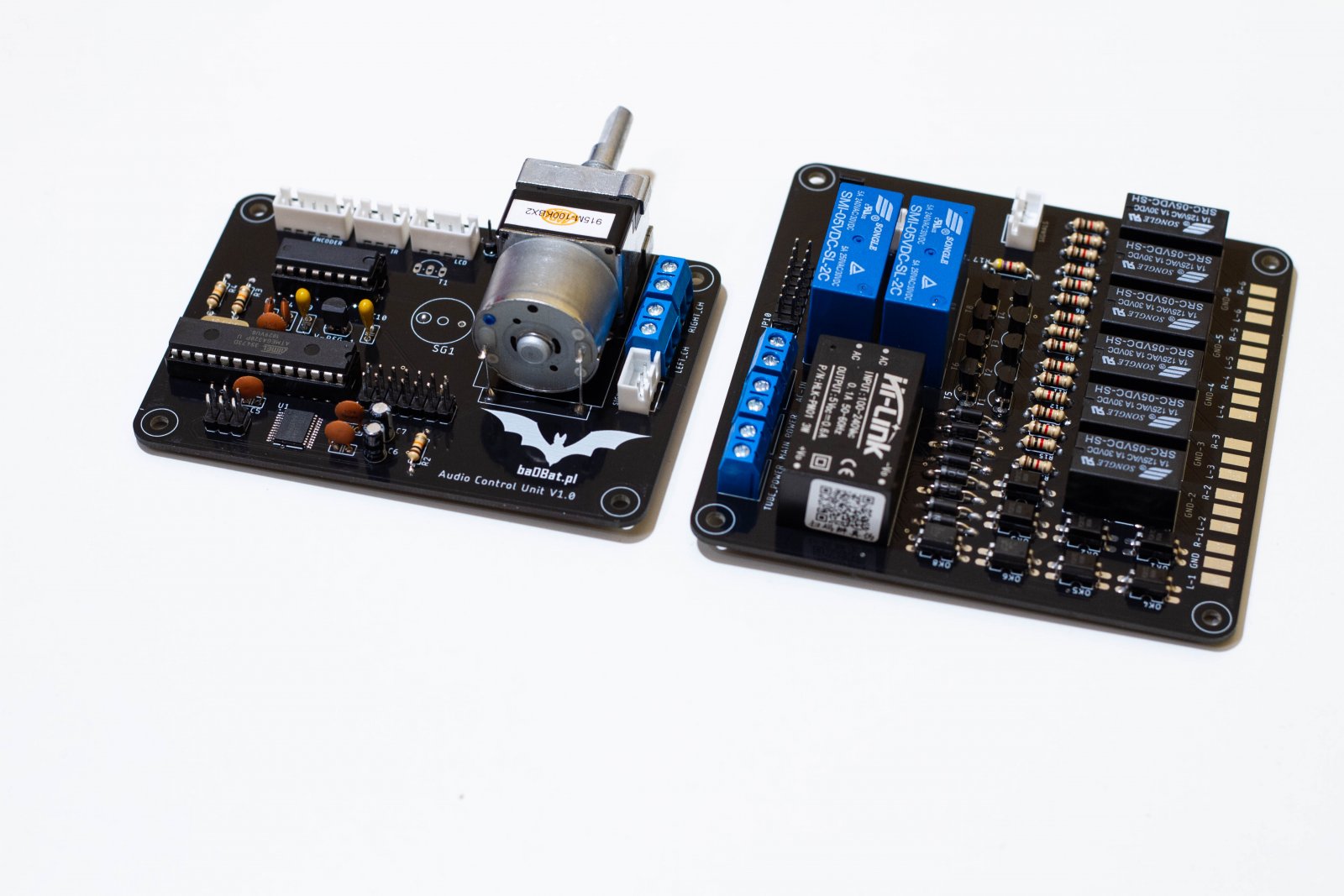
Modu³owa budowa - Dziêki rozdzieleniu urz±dzenia na dwa osobne modu³y ³±czone ta¶m± IDC bêdzie pasowa³ do ka¿dej konstrukcji.
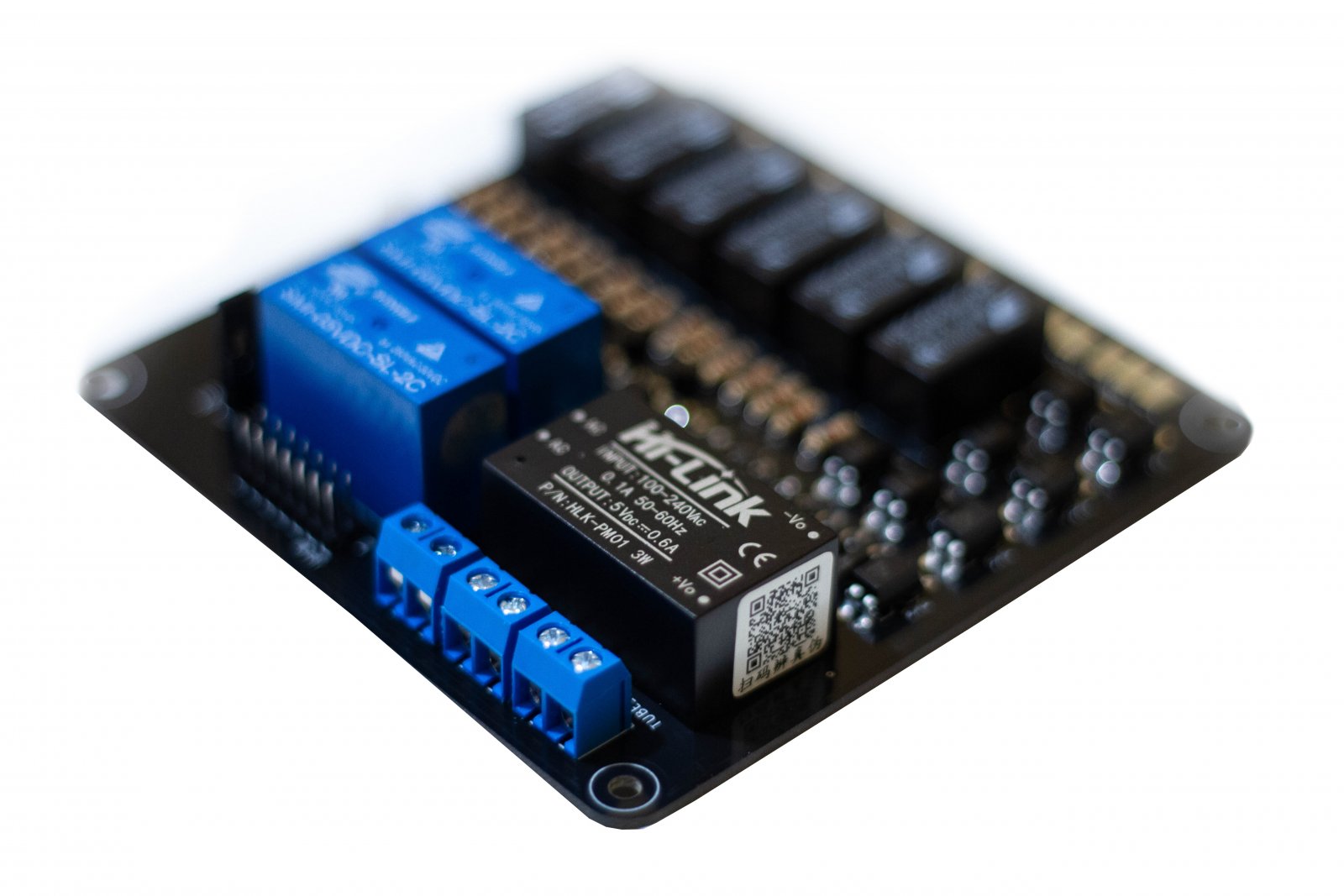
Odporno¶æ na zak³ócenia - tor audio zosta³ ca³kowicie oddzielony od sygna³ów cyfrowych a zastosowany zasilacz nie generuje zak³óceñ mog±cych wp³yn±æ na jako¶æ d¼wiêku.
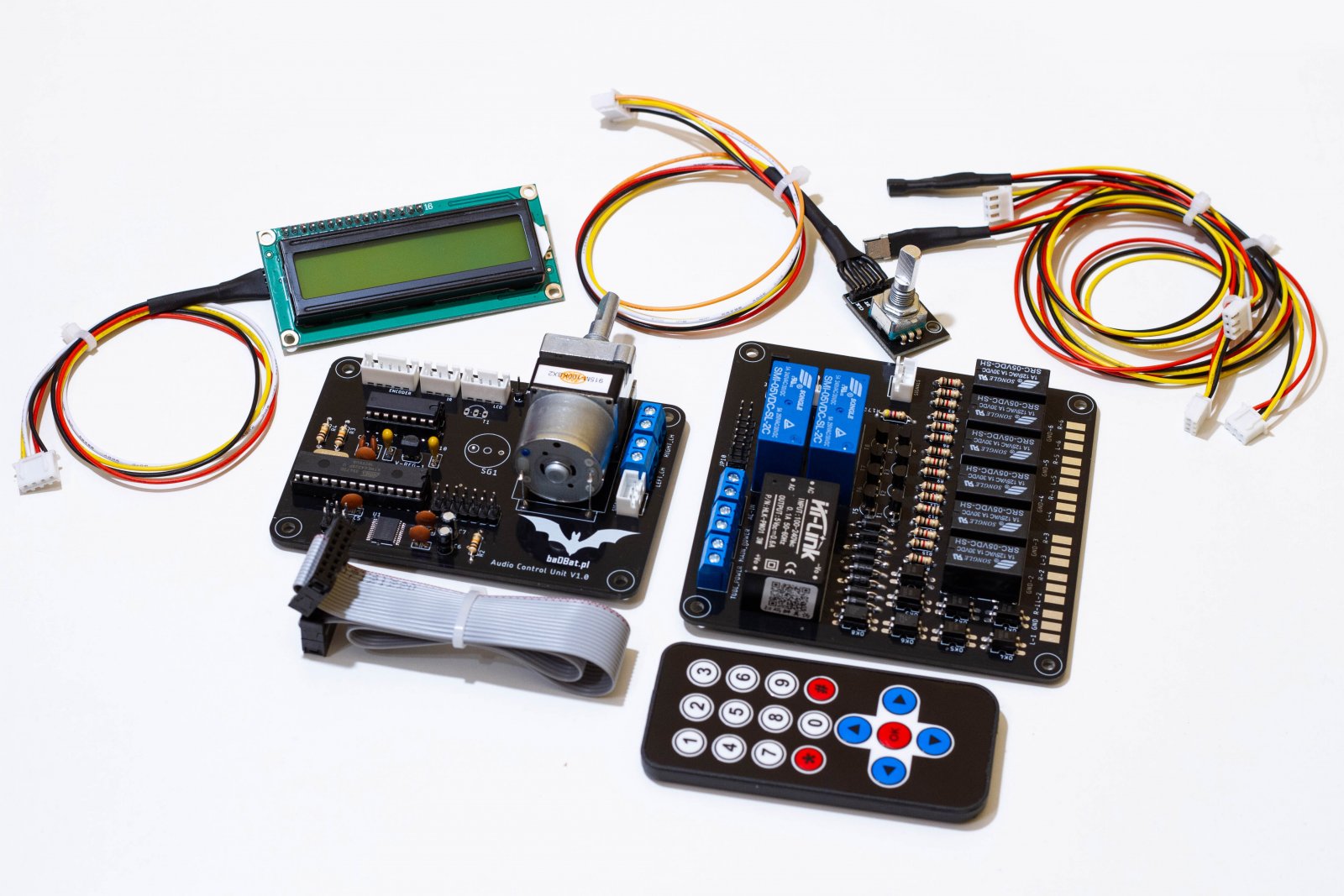
W zestawie znajduje siê:
Modu³ potencjometru
Modu³ przeka¼ników
Wy¶wietlacz LCD
Enkoder
Czujnik IR (do pilota)
Czujnik temperatury
Ta¶ma IDC
Przewody sygna³u audio
Pilot
Instrukcja obs³ugi
Przewody toru audio mog± byæ ekranowane.










ACU - Audio Control Unit
Mikroprocesorowy selektor stworzony z my¶l± o wymagaj±cych konstrukcjach, wyposa¿ony jest we w³asne zasilanie, wy¶wietlacz LCD, enkoder, czujnik temperatury oraz pilot.
Selektor posiada potencjometr marki ALPS wyposa¿ony w silnik dziêki temu g³o¶no¶ci± mo¿emy sterowaæ poprzez pilot zdalnego sterowania.
ACU posiada czujnik temperatury, przy pomocy ukrytego menu sam mo¿esz ustaliæ temperaturê która mo¿e uszkodziæ Twój wzmacniacz, po osi±gniêciu krytycznej warto¶ci selektor wy³±czy zasilanie wzmacniacza.
6 kana³ów - urz±dzenia posiada 6 wej¶æ: DAC, CD, PHONO, TUNER, AUX, TAPE
Tryb STANDBY - dziêki pe³nej integracji z ka¿dym wzmacniaczem, selektor umo¿liwia sterowanie transformatorem wzmacniacza i pe³ne wsparcie dla tryby STANDBY przez pilot zdalnego sterowania lub enkoder (pobór pr±du w tym trybie to zaledwie 20mA)
Opó¼nienie startu dla PHONO - wybieraj±c odpowiednie po³o¿enie jednej zworki na laminacie mo¿esz uaktywniæ opó¼nienie startu dla wej¶cia PHONO (je¶li posiadasz lampowe PHONO pozwoli to unikn±æ nieprzyjemnych d¼wiêków w czasie nagrzewania lampy) czas opó¼nienia mo¿esz ustawiæ sam w ukrytym menu.
Pamiêæ wszystkich ustawieñ - dziêki zastosowaniu mikroprocesora selektor pamiêta ostatni wybór oraz wszystkie ustawienia nawet po ca³kowitym od³±czeniu go od pr±du.
Wygaszacz LCD - dla wiêkszego komfortu u¿ytkowania, wy¶wietlacz LCD wygasza swoje pod¶wietlenie w czasie bezczynno¶ci po up³ywie 60 sekund. Pod¶wietlenie wraca automatycznie przy uruchomieniu jakiejkolwiek funkcji lub poruszeniu selektora.
Modu³owa budowa - Dziêki rozdzieleniu urz±dzenia na dwa osobne modu³y ³±czone ta¶m± IDC bêdzie pasowa³ do ka¿dej konstrukcji.
Odporno¶æ na zak³ócenia - tor audio zosta³ ca³kowicie oddzielony od sygna³ów cyfrowych a zastosowany zasilacz nie generuje zak³óceñ mog±cych wp³yn±æ na jako¶æ d¼wiêku.
W zestawie znajduje siê:
Modu³ potencjometru
Modu³ przeka¼ników
Wy¶wietlacz LCD
Enkoder
Czujnik IR (do pilota)
Czujnik temperatury
Ta¶ma IDC
Przewody sygna³u audio
Pilot
Instrukcja obs³ugi
Przewody toru audio mog± byæ ekranowane.



Skomentuj